

���������ֱ��ξ�3Dģ��_ProE���_step(stp)�ļ�����


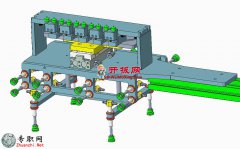
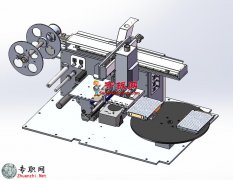
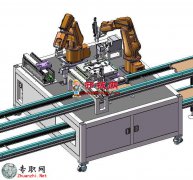
���������ֱ��ξ�
--�������ֱ��ξߣ�ͨ����ת�ξߵ�4�棬�ﵽ��ȡ��ͬ��λ��Ŀ�ģ������˹ؽڶ�������Լ��CTʱ�䣬����˹���Ч�ʡ�
--������ͨ������Ԫ����������һģ��Ѩ�����ľ��35mm��Ϊ50mm,�Ӷ���Լ��ʱ�䡣
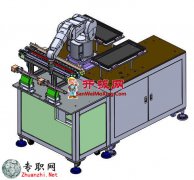
���������ֱ��ξ�
--�������ֱ��ξߣ�ͨ����ת�ξߵ�4�棬�ﵽ��ȡ��ͬ��λ��Ŀ�ģ������˹ؽڶ�������Լ��CTʱ�䣬����˹���Ч�ʡ�
--������ͨ������Ԫ����������һģ��Ѩ�����ľ��35mm��Ϊ50mm,�Ӷ���Լ��ʱ�䡣

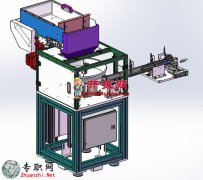

 ɴͲת�˳�RGVС��3Dģ��ͼֽ_So
ɴͲת�˳�RGVС��3Dģ��ͼֽ_SolidW
ɴͲת�˳�RGVС��3Dģ��ͼֽ_So
ɴͲת�˳�RGVС��3Dģ��ͼֽ_SolidW
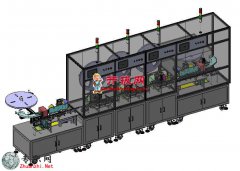
 �DZ��Զ����ʼDZ�����˿��3Dģ��
�DZ��Զ����ʼDZ�����˿��3Dģ��_Sol
�DZ��Զ����ʼDZ�����˿��3Dģ��
�DZ��Զ����ʼDZ�����˿��3Dģ��_Sol
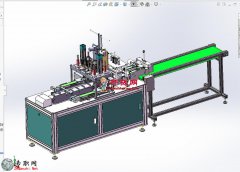
 �Զ������伤�⺸���豸3Dģ��_S
�Զ������伤�⺸���豸3Dģ��_Solid
�Զ������伤�⺸���豸3Dģ��_S
�Զ������伤�⺸���豸3Dģ��_Solid
 A10-Tray�Զ�����ץȡ��λ3Dģ��
A10-Tray�Զ�����ץȡ��λ3Dģ��_Sol
A10-Tray�Զ�����ץȡ��λ3Dģ��
A10-Tray�Զ�����ץȡ��λ3Dģ��_Sol