

�����˱�λ�����Ӽо�3Dģ��_SW���_step(stp)/Sldprt/Sldasm�ļ�����
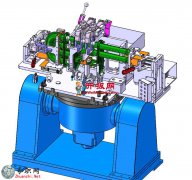
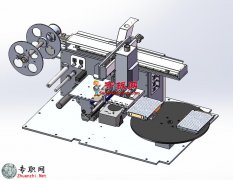
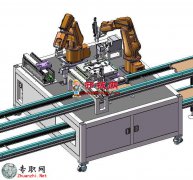
�����˱�λ�����Ӽо�
1.����ƽ̨������ͨ�������ϵĵ������T��˿��ʵ�֣������������ܣ���֤�ϵ����������䡣
2.����ƽ̨��ת���ɵ��������ת֧�Ŵ�������ƽ̨��ת�����У�˫��������ʱ���Ҳ������ĵ�������������ת֧�ŶϿ�����������������ʹ��ʱ���Ҳ������������ת֧�����ϣ���������̨��ת��
3.�Ҳ������������˹���������ת����ת��λ����˨š���̶���������Ϊһ�������ĺ��ӷ�ת��λ��ʹ�á�


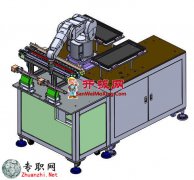
�����˱�λ�����Ӽо�
1.����ƽ̨������ͨ�������ϵĵ������T��˿��ʵ�֣������������ܣ���֤�ϵ����������䡣
2.����ƽ̨��ת���ɵ��������ת֧�Ŵ�������ƽ̨��ת�����У�˫��������ʱ���Ҳ������ĵ�������������ת֧�ŶϿ�����������������ʹ��ʱ���Ҳ������������ת֧�����ϣ���������̨��ת��
3.�Ҳ������������˹���������ת����ת��λ����˨š���̶���������Ϊһ�������ĺ��ӷ�ת��λ��ʹ�á�


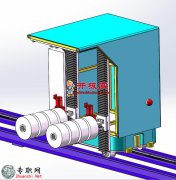 ɴͲת�˳�RGVС��3Dģ��ͼֽ_So
ɴͲת�˳�RGVС��3Dģ��ͼֽ_SolidW
ɴͲת�˳�RGVС��3Dģ��ͼֽ_So
ɴͲת�˳�RGVС��3Dģ��ͼֽ_SolidW
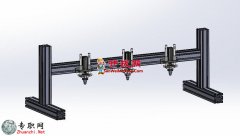
 �DZ��Զ����ʼDZ�����˿��3Dģ��
�DZ��Զ����ʼDZ�����˿��3Dģ��_Sol
�DZ��Զ����ʼDZ�����˿��3Dģ��
�DZ��Զ����ʼDZ�����˿��3Dģ��_Sol
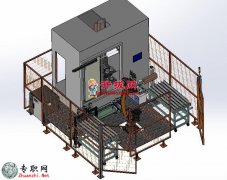
 �Զ������伤�⺸���豸3Dģ��_S
�Զ������伤�⺸���豸3Dģ��_Solid
�Զ������伤�⺸���豸3Dģ��_S
�Զ������伤�⺸���豸3Dģ��_Solid
 A10-Tray�Զ�����ץȡ��λ3Dģ��
A10-Tray�Զ�����ץȡ��λ3Dģ��_Sol
A10-Tray�Զ�����ץȡ��λ3Dģ��
A10-Tray�Զ�����ץȡ��λ3Dģ��_Sol